
In my series for my Statics class, we have two examples of vector addition. Both of these are taken from (with some modification) from Levinson.

The first (shown at the right) concerns two forces P1 and P2 which are each 60 degrees from the positive x-axis (OC) but on opposite sides. Assuming that P1 = P2, determine the value of the resultant R. Do this in two ways: with “old coot” methods and with formal vector analysis.
In either case we need to break up the vectors into their components. For an angle α those components are as follows:
Px = P cos (α) (1a)
Py = P cos (90 – α) (1b)
The angle α is the counterclockwise angle from the positive x-axis. This is crucial; doing this is intended to prevent you from getting lost in the quadrants. The y-component can be expressed otherwise but why we do this here is better explained when we discuss direction cosines.
In any case computing the x- and y-components and solving the problem is fairly straightforward, as follows:
- α1 = 60 degrees
- α2 = 360 – 60 = 300 degrees
- Px1 = P cos (60) = 0.5 P
- Py1 = P cos (90 – 60) = 0.866 P
- Px1 = P cos (300) = 0.5 P
- Py1 = P cos (90 – 300) = -0.866 P
- It should be evident that the x-axis forces add and the y-axis forces cancel each other, thus R = P and αR = 0
Let’s transition to formal vector notation with this, from Strelkov:


In our notation formal vector expression looks like this in two dimensions:
Pn = Pn cos (αn) i + Pn cos (90 – αn) j (2)
The vectors i and j are the unit vectors in the x- and y-direction respectively. The quantities in bold are vector quantities. Some posts use a different notation.
Since we have already computed the coefficients, the vectors are as follows:
- P1 = P cos (60) i + P cos (90 – 60) j = 0.5 P i + 0.866 P j
- P2 = P cos (300) i + P cos (90 – 300) j = 0.5 P i – 0.866 P j
In vector addition (and subtraction for that matter) we add or subtract the i and j separately. Doing this means in this case the i components add and the j components cancel each other out, leaving us with
- R = P1 + P2 = P i

The second problem is at the right. The vectors are concurrent forces at a point as follows:
- P1 = 0.23 kN, α1 = 26 degrees
- P2 = 0.275 kN, α2 = 68 degrees
- P3 = 0.213 kN, α3 = 15 degrees
- P4 = 0.3 kN, α4 = 59 degrees
- P5 = 0.3 kN, α5 = 31 degrees
We must determine whether system is in equilibrium at Point 0, using both methods of vector analysis. As before, For conditions of static equilibrium, forces at 0 must sum to zero in a vector sense, thus the sum of all P = 0.
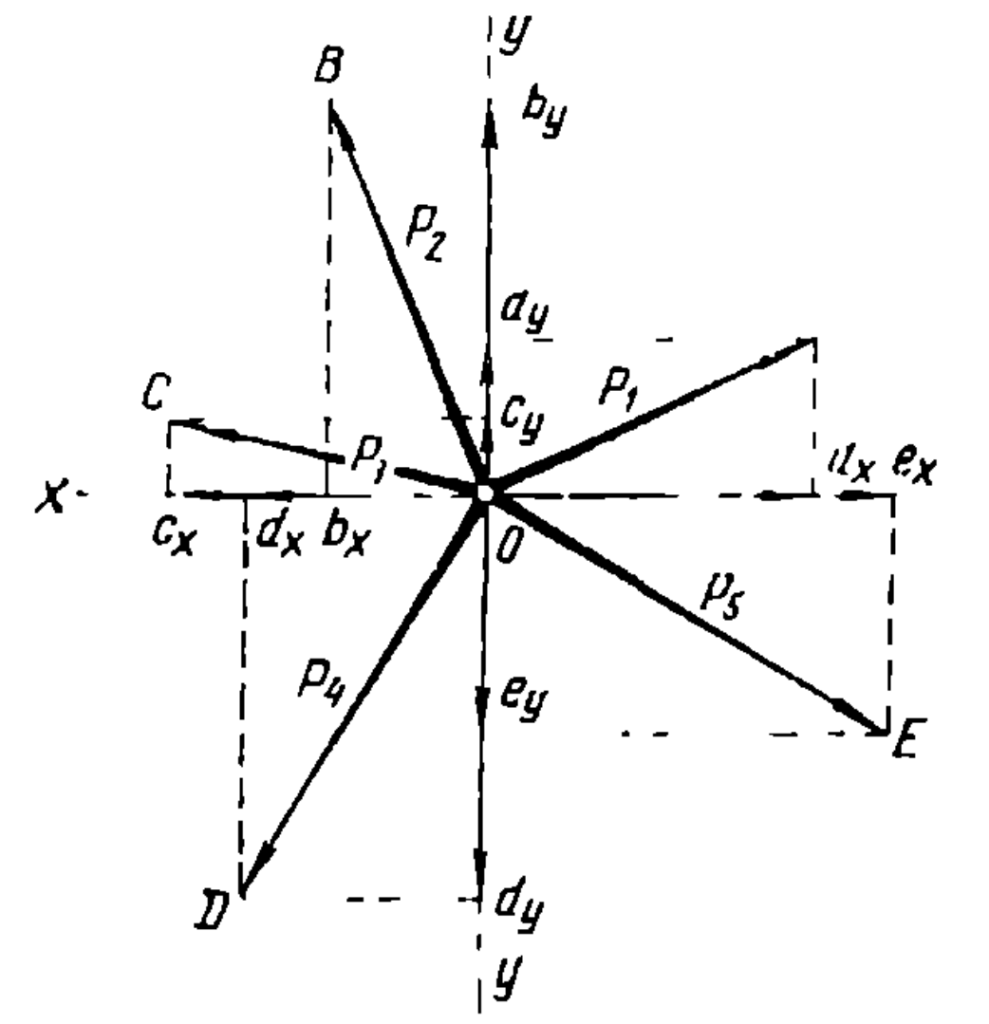
Since these are vector quantities, the forces in the x-direction and the forces in the y-direction must both equal zero, or (see diagram at left)
- ax + bx + cx + dx + ex = 0
- P1x + P2x + P3x + P4x + P5x = 0
- ay + by + cy + dy + ey = 0
- P1y + P2y + P3y + P4y + P5y = 0
The angles of each force should be defined in a counterclockwise direction from the positive x-axis so the signs of the components will be correct, thus the input data for this problem is as follows:
| Force | Scalar Magnitude, kN | Angle from x-axis on drawing, degrees | Angle from positive x-axis α, degrees | Angle from x-axis α, radians |
| 1 | 0.23 | 26 | 26 | 0.4538 |
| 2 | 0.275 | 68 | 112 | 1.9548 |
| 3 | 0.213 | 15 | 165 | 2.8798 |
| 4 | 0.3 | 59 | 239 | 4.1713 |
| 5 | 0.3 | 31 | 329 | 5.7421 |
The components of the forces are computed from Equations (1a) and (1b). For example, considering force P4,
- The cosines are as follows: cos αn = −0.515 and cos (90-αn) = −0.857
- The forces are P4x = (0.3)(-.515) = -0.1545 and P4y = (0.3)(-0.857) = -0.2572
If we repeat this for all of the forces, the results are as follows:
| Force | Scalar Magnitude, kN | Angle from x-axis on drawing, degrees | Angle from positive x-axis, degrees | Angle from x-axis, radians | X-direction component, kN | Y-direction Component, kN |
| 1 | 0.23 | 26 | 26 | 0.4538 | 0.2067 | 0.1008 |
| 2 | 0.275 | 68 | 112 | 1.9548 | -0.1030 | 0.2550 |
| 3 | 0.213 | 15 | 165 | 2.8798 | -0.2057 | 0.0551 |
| 4 | 0.3 | 59 | 239 | 4.1713 | -0.1545 | -0.2572 |
| 5 | 0.3 | 31 | 329 | 5.7421 | 0.2572 | -0.1545 |
| Sums | 0.001 | -0.001 |
We can see that the sums are very small, thus for practical purposes the point O is in equilibrium.
For the formal vector solution, we have done most of the hard work because we have identified the x- and y- components of each force. We use the unit vectors i (x-direction) and j (y-direction) to designate the components. We thus write the vector forces as follows:
- P1 = 0.2067 i + 0.1008 j
- P2 = -0.1030 i + 0.2550 j
- P3 = -0.2057 i + 0.0551 j
- P4 = -0.1545 i – 0.2572 j
- P5 = 0.2572 i – 0.1545 j
To obtain the net force on Point 0, we simply add the i forces (x-direction) and j forces (y-direction) to check
- ΣPx = 0.2067 i – 0.1030 i -0.2057 i – 0.1545 i + 0.2572 i ~ 0
- ΣPy = 0.1008 j + 0.2550 j + 0.0551 j – 0.2572 j – 0.1545 j ~ 0
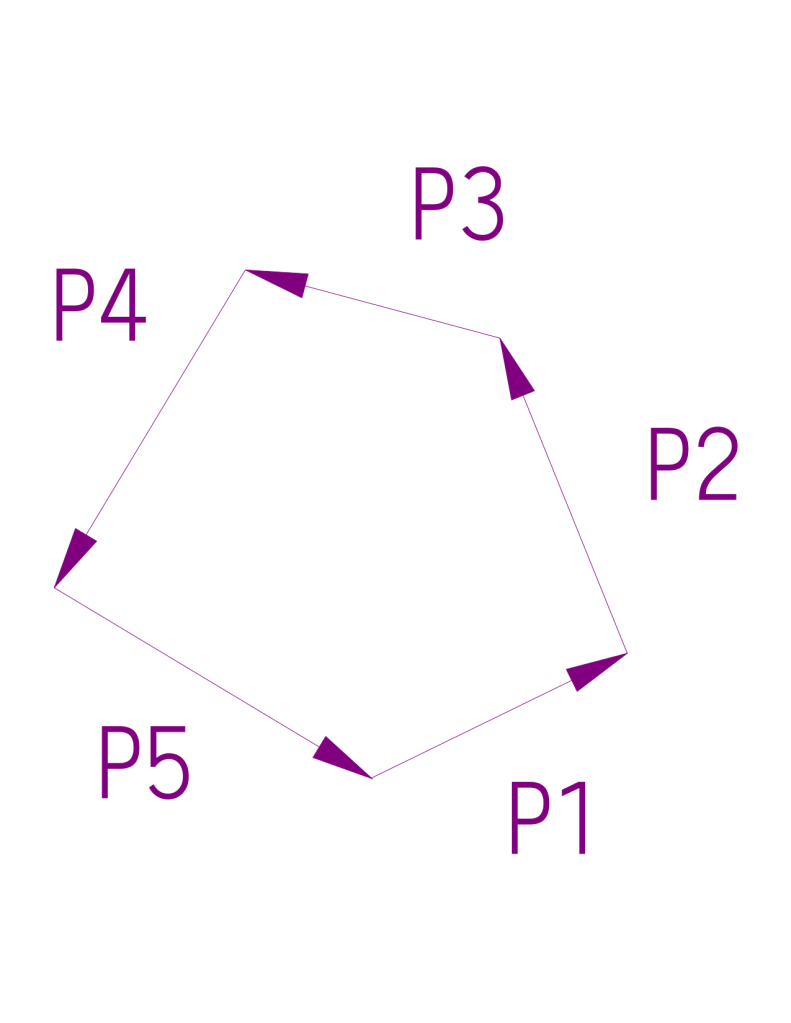
After these things I decided to do this problem graphically on CAD. By simply going from one force to another with the magnitude and direction, I came up with this diagram, which shows that the resolution of the forces is very small.
Notes
- In vector addition and subtraction, do not mix different direction components, such as i forces with j forces.
- The components of the forces are also referred to as the projections of the vectors on the x- or y-axis.
- Although there is little advantage to using vector notation in this problem, with three-dimensional problems of greater complexity it is better.
Example of Dot Product
We can also use this to illustrate the use of the dot product, which is described below.
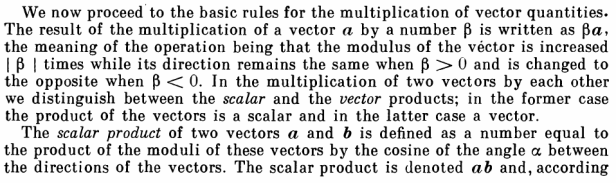



Consider the vectors P1 and P2. Determine the following:
- Dot Product of P1 and P2
- Angle between P1 and P2
The vectors are given above. We want to use Equation (7.9) to determine the actual dot product and Equation (7.8) to determine the angle. Starting with (7.8,)
(.2067)(-0.1030)+(.1008)(.2550) = (0.23)(0.275) cos α1-2
The left hand side is the dot product according to Equation (7.9,) or 0.0044139. On the right hand side P1 P2 = 0.06325. The angle between them α1-2 = arccos (0.0044139/0.06325) = 86 degrees. This can be checked against the given geometry and shown to be correct.
