“Rules of thumb” have been the rule with this method of determining the metastatic height. This post, however, attempts to answer where these rules comes from in a more scientific fashion.
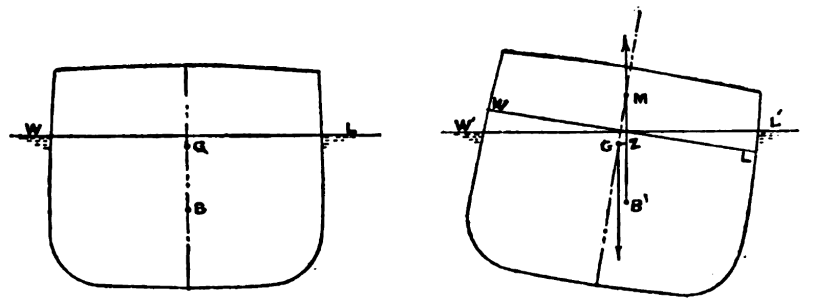
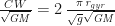
Let’s start by looking at a figure from our old friend, Know Your Own Ship, which is at the top of the post.
You’ll note that, as the ship rolls from the vertical, the centre of buoyancy comes out from under the centre of gravity, but it’s still under the metastatic centre. At this point we note our basic assumption: that a ship rolling is acting as a pendulum, with the metastatic centre being the pivot point of the swing. (Now you know what the metastatic centre is all about…)
Getting into pendulum dynamics is beyond the scope of a fluid mechanics course. We’re going to assume that the rotational mass moment of inertia is significant for this pendulum (which it is.) (An interesting application of this theory is here.) The equation of motion for this system is

where
= roll angle as a function of time
= mass of the ship
= acceleration due to gravity
= rotational mass moment of inertia of the ship
Noting that

where 

The solution of Equation (1) is thus

At this point we don’t need to actually substitute the constants for Equation (4). All we need to do is to note that the total period of oscillation–the roll time of the ship from one side to another and back again–is

This is confirmed in Know Your Own Ship Appendix A, except that they consider the period from vertical to side to vertical, or half what we do. Knowing this, we can rewrite the original equation for roll time as

The problem with using this equation should be obvious: how do we know the radius of gyration of the ship? And how did the original equation get away without knowing it? Let’s equate the two roll times equations thus:
and define

Combining Equations (7) and (8) and solving for 

Substituting the unit-appropriate values of 


Assuming the “rule of thumb” value for

We can “rock the boat” and use the results to determine the metastatic height by solving for GM,

The advantage of this formulation is that it’s easier to use different unit systems with it, since it is units consistent. That’s especially good since, for our experiment, we recommend using CGS units to measure the ship and the resulting data.
In yacht design, another rule of thumb is that the roll time is seconds should be between 1 and 1.1 times the beam W of the boat in meters. Yachts with shorter roll times tend to “check” or quickly come back to centre when in rough seas; this can be a hard experience for passengers and make a complete mess of stowed cargo. Yachts with longer roll times will come over like they’re about to capsize, and then slowly roll back around. The usual result of this is seasickness and a miserable ride.
References
- Gerr, D. (1992) The Nature of Boats. International Marine Publishing, Camden, ME.
- Meriam, J.L. (1975) Dynamics (SI Version) Second Edition. New York: John Wiley and Sons, Inc.
- Nudelman, N. (1992) Yacht Design Course. Lesson 6: Stability. Westlawn Institute of Marine Technology, Stamford, CT.
- Walton, T. (1899) Know Your Own Ship. Charles Griffin and Company, London, England.
